MicroMac, a Macintosh for under £5
A microcontroller Macintosh
This all started from a conversation about the RP2040 MCU, and building a simple desktop/GUI for it. I’d made a comment along the lines of “or, just run some old OS”, and it got me thinking about the original Macintosh.
The original Macintosh was released 40.5 years before this post, and is a pretty cool machine especially considering that the hardware is very simple. Insanely Great and folklore.org are fun reads, and give a glimpse into the Macintosh’s development. Memory was a squeeze; the original 128KB version was underpowered and only sold for a few months before being replaced by the Macintosh 512K, arguably a more appropriate amount of memory.
But, the 128 still runs some real applications and, though it pre-dates MultiFinder/actual multitasking, I found it pretty charming. As a tourist. In 1984 the Mac cost roughly 1/3 as much as a VW Golf and, as someone who’s into old computers and old cars, it’s hard to decide which is more frustrating to use.
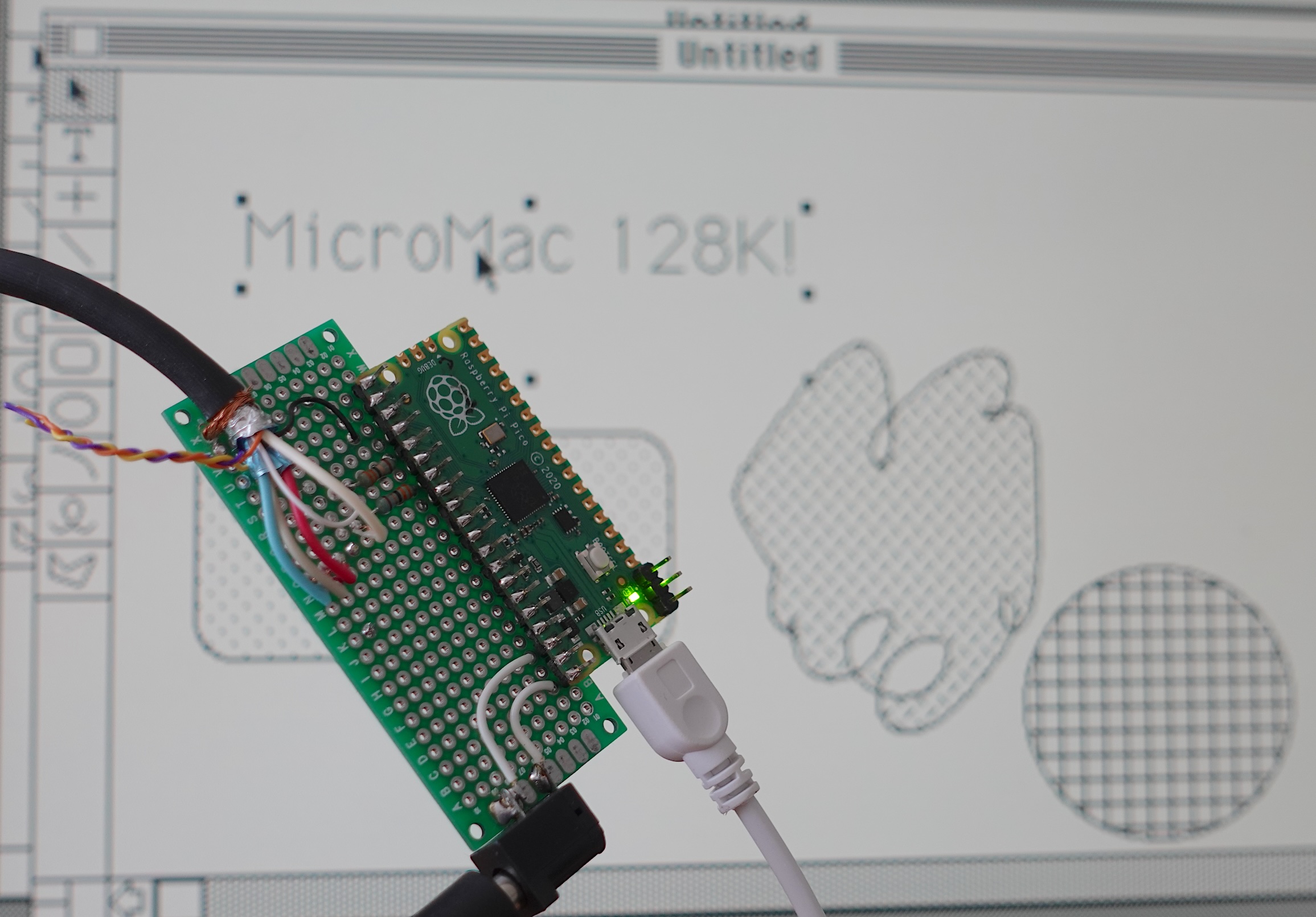
So back to this £3.80 RPi Pico microcontroller board: The RP2040’s 264KB of RAM gives a lot to play with after carving out the Mac’s 128KB – how cool would it be to do a quick hack, and play with a Mac on it?
Time passes. A lot of time. But I totally delivered on the janky hack front:
You won’t believe that this quality item didn’t take that long to build. So the software was obviously the involved part, and turned into work on 3 distinct projects.
This post is going to be a “development journey” story, as a kind of code/design/venting narrative. If you’re just here for the pictures, scroll along!
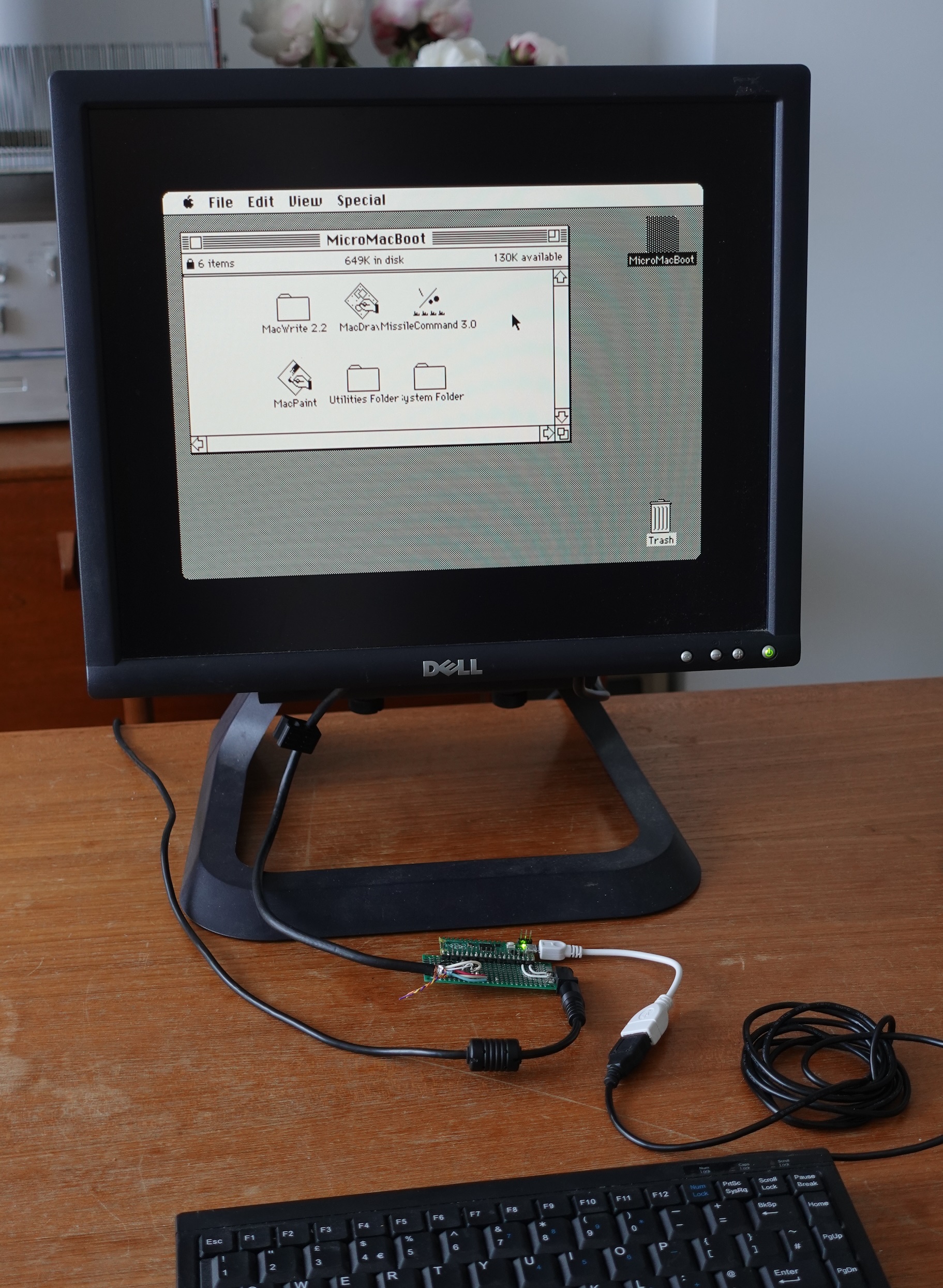
What is pico-mac?
A Raspberry Pi RP2040 microcontroller (on a Pico board), driving monochrome VGA video and taking USB keyboard/mouse input, emulating a Macintosh 128K computer and disc storage. The RP2040 has easily enough RAM to house the Mac’s memory, plus that of the emulator; it’s fast enough (with some tricks) to meet the performance of the real machine, has USB host capability, and the PIO department makes driving VGA video fairly uneventful (with some tricks). The basic Pico board’s 2MB of flash is plenty for a disc image with OS and software.
Here’s the Pico MicroMac in action, ready for the paperless office of the future:
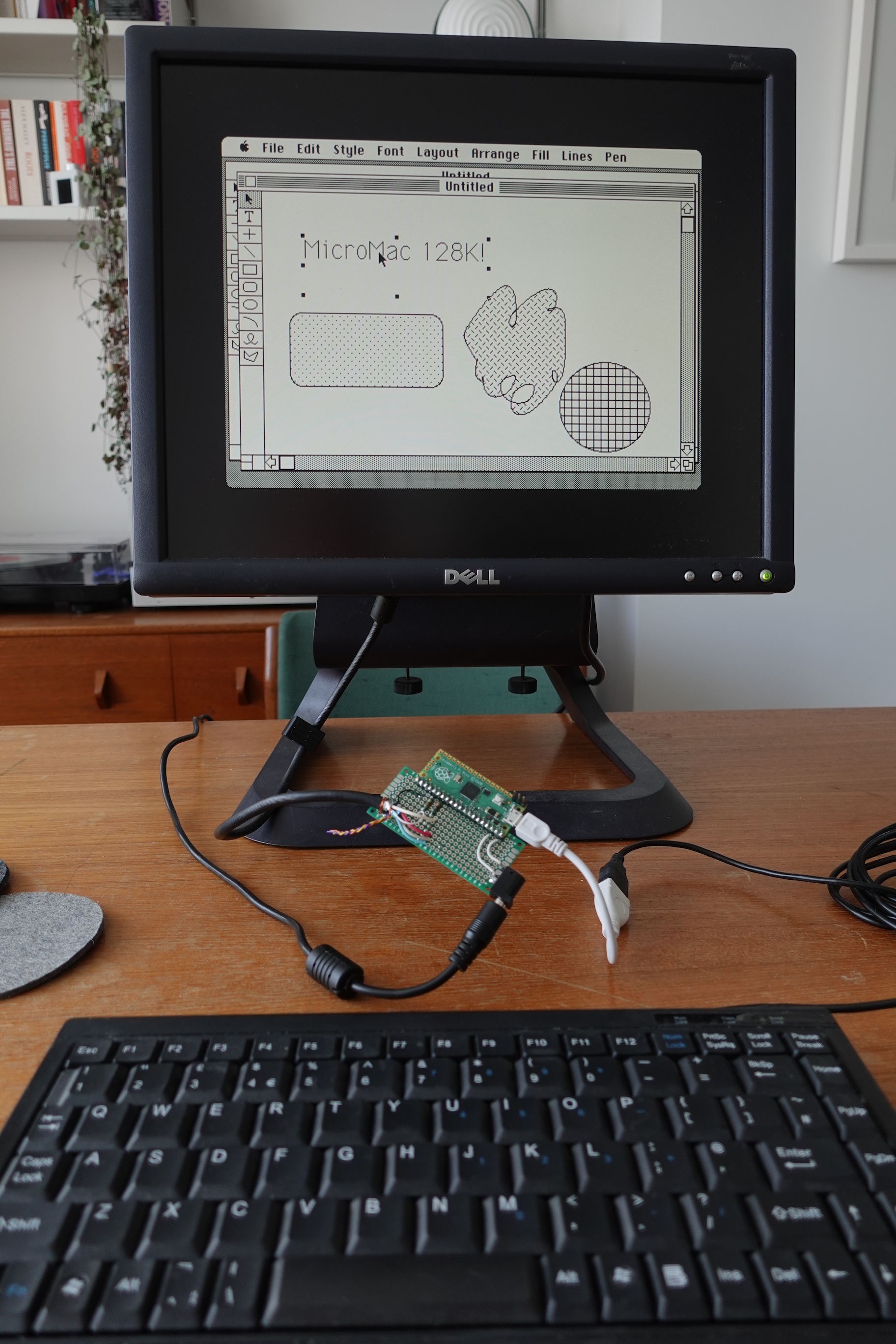
I hadn’t really used a Mac 128K much before; a few clicks on a museum machine once. But I knew they ran MacDraw, and MacWrite, and MacPaint. All three of these applications are pretty cool for a 128K machine; a largely WYSIWYG word processor with multiple fonts, and a vector drawing package.
A great way of playing with early Macintosh system software, and applications of these wonderful machines is via https://infinitemac.org, which has shrinkwrapped running the Mini vMac emulator by emscriptening it to run in the browser. Highly recommended, lots to play with.
As a spoiler, MicroMac does run MacDraw, and it was great to play with it on “real fake hardware”:
(Do you find “Pico Micro Mac” doesn’t really scan? I didn’t think this taxonomy through, did I?)
GitHub links are at the bottom of this page: the pico-mac repo has construction directions if you want to build your own!
The journey
Back up a bit. I wasn’t committed to building a Pico thing, but was vaguely interested in whether it was feasible, so started tinkering with building a Mac 128K emulator on my normal computer first.
The three rules
I had a few simple rules for this project:
- It had to be fun. It’s OK to hack stuff to get it working, it’s not as though I’m being paid for this.
- I like writing emulation stuff, but I really don’t want to learn 68K assembler, or much about the 68K. There’s a lot of love for 68K out there and that’s cool, but meh I don’t adore it as a CPU. So, right from the outset I wanted to use someone else’s 68K interpreter – I knew there were loads around.
- Similarly, there are a load of OSes whose innards I’d like to learn more about, but the shittiest early Mac System software isn’t high on the list. Get in there, emulate the hardware, boot the OS as a black box, done.
I ended up breaking 2 of and sometimes all 3 of these rules during this project.
The Mac 128K
The machines are generally pretty simple, and of their time. I started with schematics and Inside Macintosh, PDFs of which covered various details of the original Mac hardware, memory map, mouse/keyboard, etc.
- https://tinkerdifferent.com/resources/macintosh-128k-512k-schematics.79/
- https://vintageapple.org/inside_o/ Inside Macintosh Volumes I-III are particularly useful for hardware information; also Guide to Macintosh Family Hardware 2nd Edition.
The Macintosh has:
- A Motorola 68000 CPU running at
7.whatever MHzroughly 8MHz - Flat memory, decoded into regions for memory-mapped IO going to the 6522 VIA, the 8530 SCC, and the IWM floppy controller. (Some of the address decoding is a little funky, though.)
- Keyboard and mouse hang off the VIA/SCC chips.
- No external interrupt controller: the 68K has 3 IRQ lines, and there are 3 IRQ sources (VIA, SCC, programmer switch/NMI).
- “No slots” or expansion cards.
- No DMA controller: a simple autonomous PAL state machine scans video (and audio samples) out of DRAM. Video is fixed at 512x342 1BPP.
- The only storage is an internal FDD (plus an external drive), driven by the IWM chip.
The first three Mac models are extremely similar:
- The Mac 128K and Mac 512K are the same machine, except for RAM.
- The Mac Plus added SCSI to a convenient space in the memory map and an 800K floppy drive, which is double-sided whereas the original was a single 400K side.
- The Mac Plus ROM also supports the 128K/512K, and was an upgrade to create the Macintosh 512Ke. ‘e’ for Extra ROM Goodness.
The Mac Plus ROM supports the HD20 external hard disc, and HFS, and Steve Chamberlin has annotated a disassembly of it. This was the ROM to use: I was making a Macintosh 128Ke.
Mac emulator: umac
After about 8 minutes of research, I chose the Musashi 68K interpreter. It’s C, simple to interface to, and had a simple out-of-box example of a 68K system with RAM, ROM, and some IO. Musashi is structured to be embedded in bigger projects: wire in memory read/write callbacks, a function to raise an IRQ, call execute in a loop, done.
I started building an emulator around it, which ultimately became the umac project. The first half (of, say, five halves) went pretty well:
- A simple commandline app loading the ROM image, allocating RAM, providing debug messages/assertions/logging, and configuring Musashi.
- Add address decoding: CPU reads/writes are steered to RAM, or ROM. The “overlay” register lets the ROM boot at
0x00000000and then trampoline up to a high ROM mirror after setting up CPU exception vectors – this affects the address decoding. This is done by poking a VIA register, so decoded just that bit of that register for now. - At this point, the ROM starts running and accessing more non-existent VIA and SCC registers. Added more decoding and a skeleton for emulating these devices elsewhere – the MMIO read/writes are just stubbed out.
- There are some magic addresses that the ROM accesses that “miss” documented devices: there’s a manufacturing test option that probes for a plugin (just thunk it), and then we witness the RAM size probing. The Mac Plus ROM is looking for up to 4MB of RAM. In the large region devoted to RAM, the smaller amount of actual RAM is mirrored over and over, so the probe writes a magic value at high addresses and spots where it starts to wrap around.
- RAM is then initialised and filled with a known pattern. This was an exciting point to get to because I could dump the RAM, convert the region used for the video framebuffer into an image, and see the “diagonal stripe” pattern used for RAM testing! “She’s alive!”
- Not all of the device code enjoyed reading all zeroes, so there was a certain amount of referring to the disassembly and returning, uh,
0xffffffffsometimes to push it further. The goal was to get it as far as accessing the IWM chip, i.e. trying to load the OS. - After seeing some IWM accesses there and returning random rubbish values, the first wonderful moment was getting the “Unknown Disc” icon with the question mark – real graphics! The ROM was REALLY DOING SOMETHING!
- I think I hadn’t implemented any IRQs at this point, and found the ROM in an infinite loop: it was counting a few Vsyncs to delay the flashing question mark. Diversion into a better VIA, with callbacks for GPIO register read/write, and IRQ handling. This also needed to wire into Musashi’s IRQ functions.
This was motivating to get to – remembering rule #1 – and “graphics”, even though via a manual memory dump/ImageMagick conversion, was great.
I knew the IWM was an “interesting” chip, but didn’t know details. I planned to figure it out when I got there (rule #1).
IWM, 68K, and disc drivers
My god, I’m glad I put IWM off until this point. If I’d read the “datasheet” (vague register documentation) first, I’d’ve just gone to the pub instead of writing this shitty emulator.
IWM is very clever, but very very low-level. The disc controllers in other contemporary machines, e.g. WD1770, abstract the disc physics. At one level, you can poke regs to step to track 17 and then ask the controller to grab sector 3. Not so with IWM: first, the discs are Constant Linear Velocity, meaning the angular rotation needs to change appropriate to whichever track you’re on, and second the IWM just gives the CPU a firehose of crap from the disc head (with minimal decoding). I spent a while reading through the disassembly of the ROM’s IWM driver (breaking rule #2 and rule #1): there’s some kind of servo control loop where the driver twiddles PWM values sent to a DAC to control the disc motor, measured against a VIA timer reference to do some sort of dynamic rate-matching to get the correct bitrate from the disc sectors. I think once it finds the track start it then streams the track into memory, and the driver decodes the symbols (more clever encoding) and selects the sector of interest.
I was sad. Surely Basilisk II and Mini vMac etc. had solved this in some clever way – they emulated floppy discs. I learned they do not, and do the smart engineering thing instead: avoid the problem.
The other emulators do quite a lot of ROM patching: the ROM isn’t run unmodified. You can argue that this then isn’t a perfect hardware emulation if you’re patching out inconvenient parts of the ROM, but so what. I suspect they were also abiding by a rule #1 too.
I was going to do the same: I figured out a bit of how the Mac driver interface works (gah, rule #3!) and understood how the other emulators patched this. They use a custom paravirtualised 68K driver which is copied over the ROM’s IWM driver, servicing .Sony requests from the block layer and routing them to more convenient host-side code to manage the requests. Basilisk II uses some custom 68K opcodes and a simple driver, and Mini vMac a complex driver with trappy accesses to a custom region of memory. I reused the Basilisk II driver but converted to access a trappy region (easier to route: just emulate another device). The driver callbacks land in the host/C side and some cut-down Basilisk II code interprets the requests and copies data to/from the OS-provided buffers. Right now, all I needed was to read blocks from one disc: I didn’t need different formats (or even write support), or multiple drives, or ejecting/changing images.
Getting the first block loaded from disc took waaaayyy longer than the first part. And, I’d had to learn a bit of 68K (gah), but just in the nick of time I got a Happy Mac icon as the System software started to load.
This was still a simple Linux commandline application, with zero UI. No keyboard or mouse, no video. Time to wrap it in an SDL2 frontend (the unix_main test build in the umac project), and I could watch the screen redraw live. I hadn’t coded the 1Hz timer interrupt into the VIA, and after adding that it booted to a desktop!
As an aside, I try to create a dual-target build for all my embedded projects, with a native host build for rapid prototyping/debugging; libSDL instead of an LCD. It means I don’t need to code at the MCU, so I can code in the garden. :)
Next was mouse support. Inside Macintosh and the schematics show how it’s wired, to the VIA (good) and the SCC (a beast). The SCC is my second least-favourite chip in this machine; it’s complex and the datasheet/manual seems to be intentionally written to hide information, piss off readers, get one back at the world. (I didn’t go near the serial side, its main purpose, just external IRQ management. But, it’ll do all kinds of exciting 1980s line coding schemes, offloading bitty work from the CPU. It was key for supporting things like AppleTalk.)
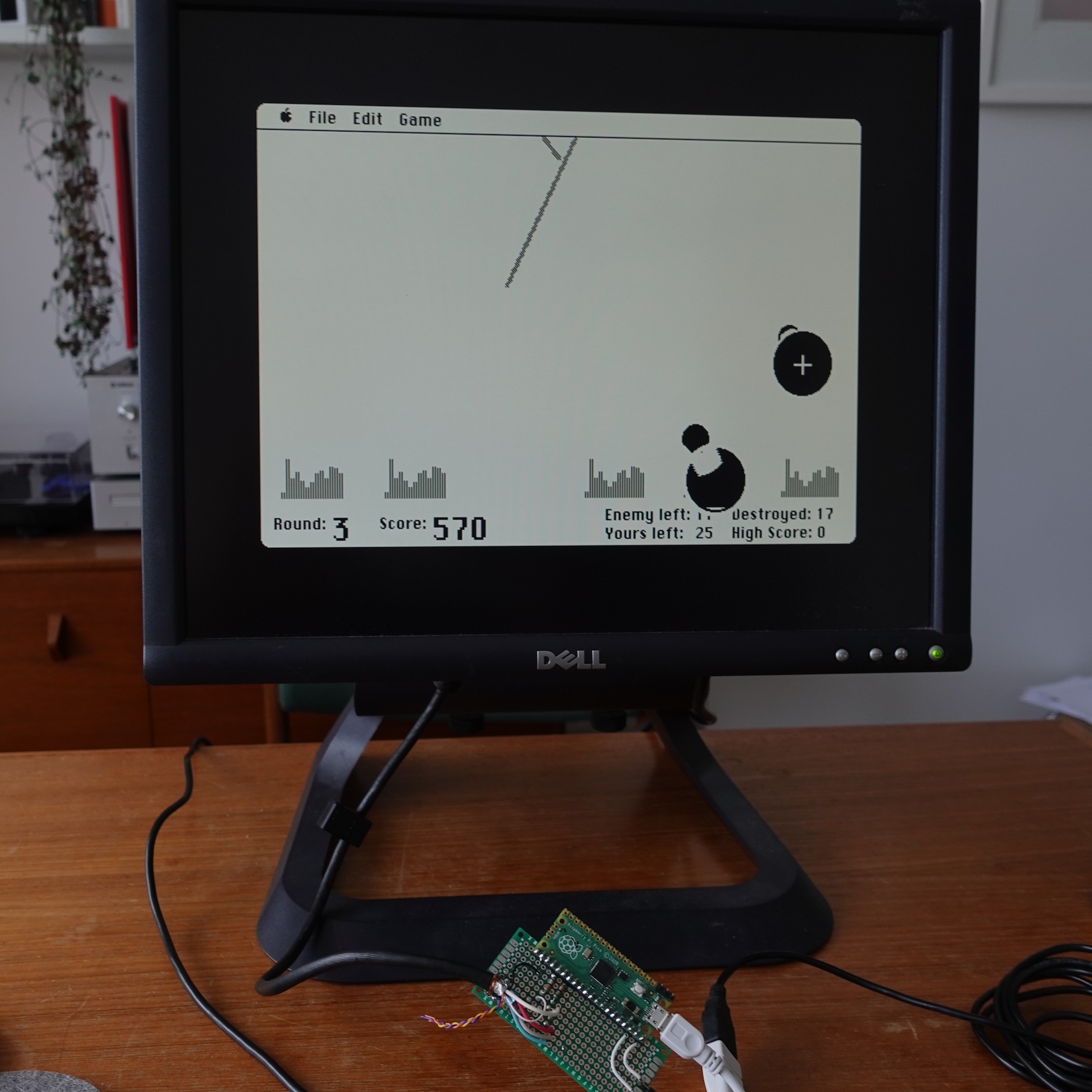
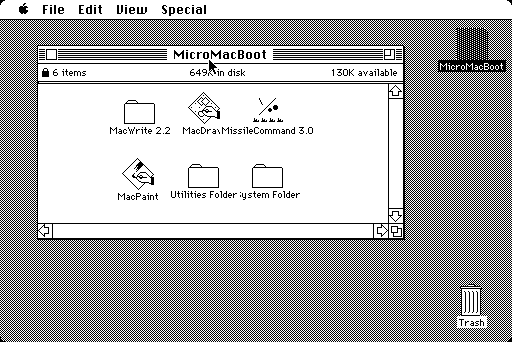
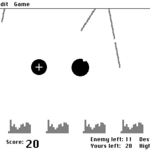
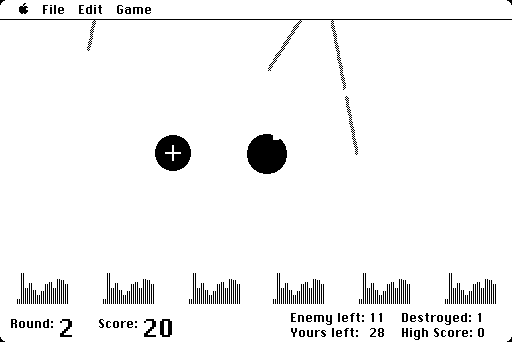
Life was almost complete at this point; with a working mouse I could build a new disc image (using Mini vMac, an exercise in itself) with Missile Command. This game is pretty fun for under 10KB on disc.
So:
- Video works
- Boots from disc
- Mouse works, Missile Command
I had no keyboard, but it’s largely working now. Time to start on sub-project numero due:
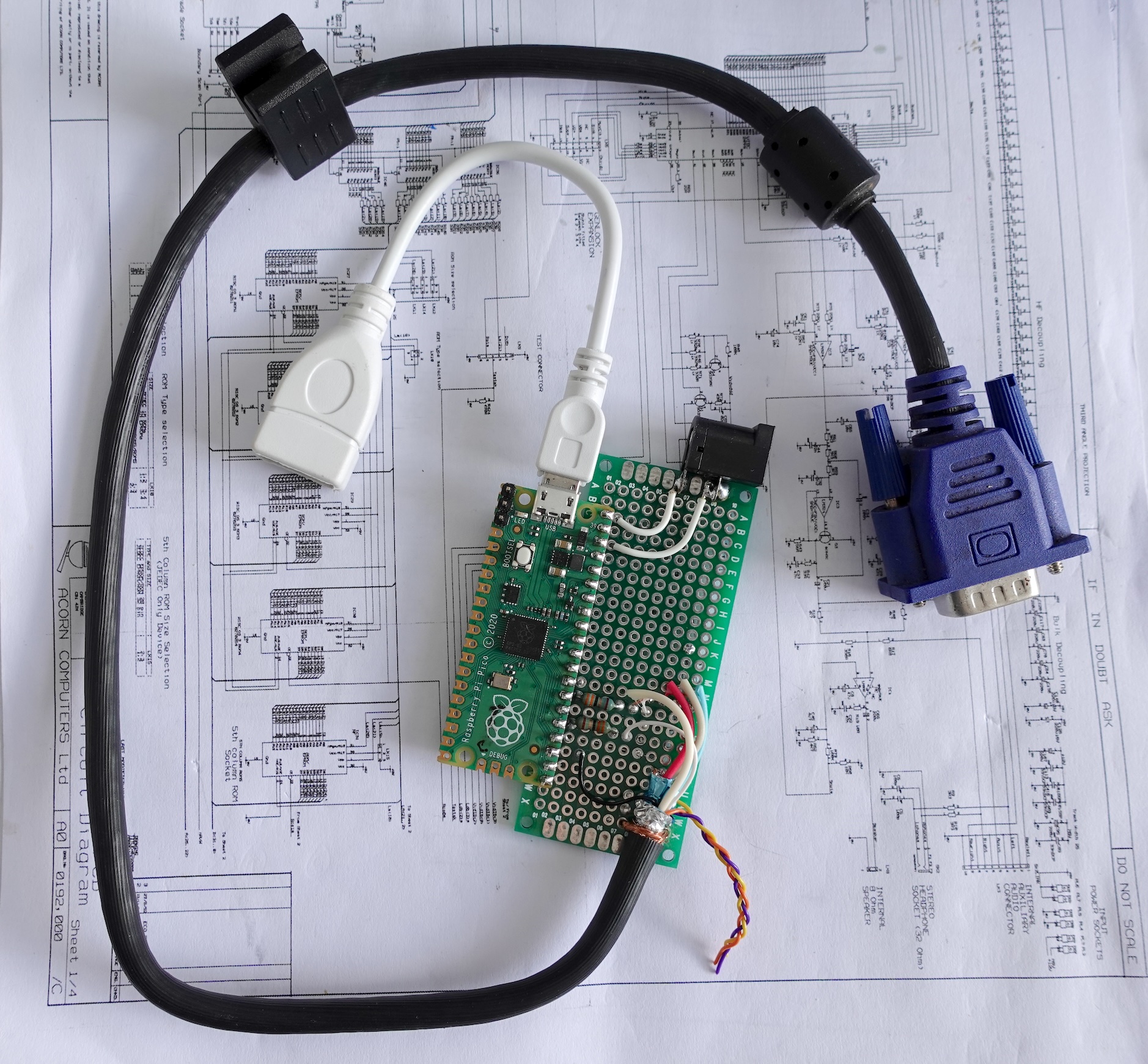
Hardware and RP2040
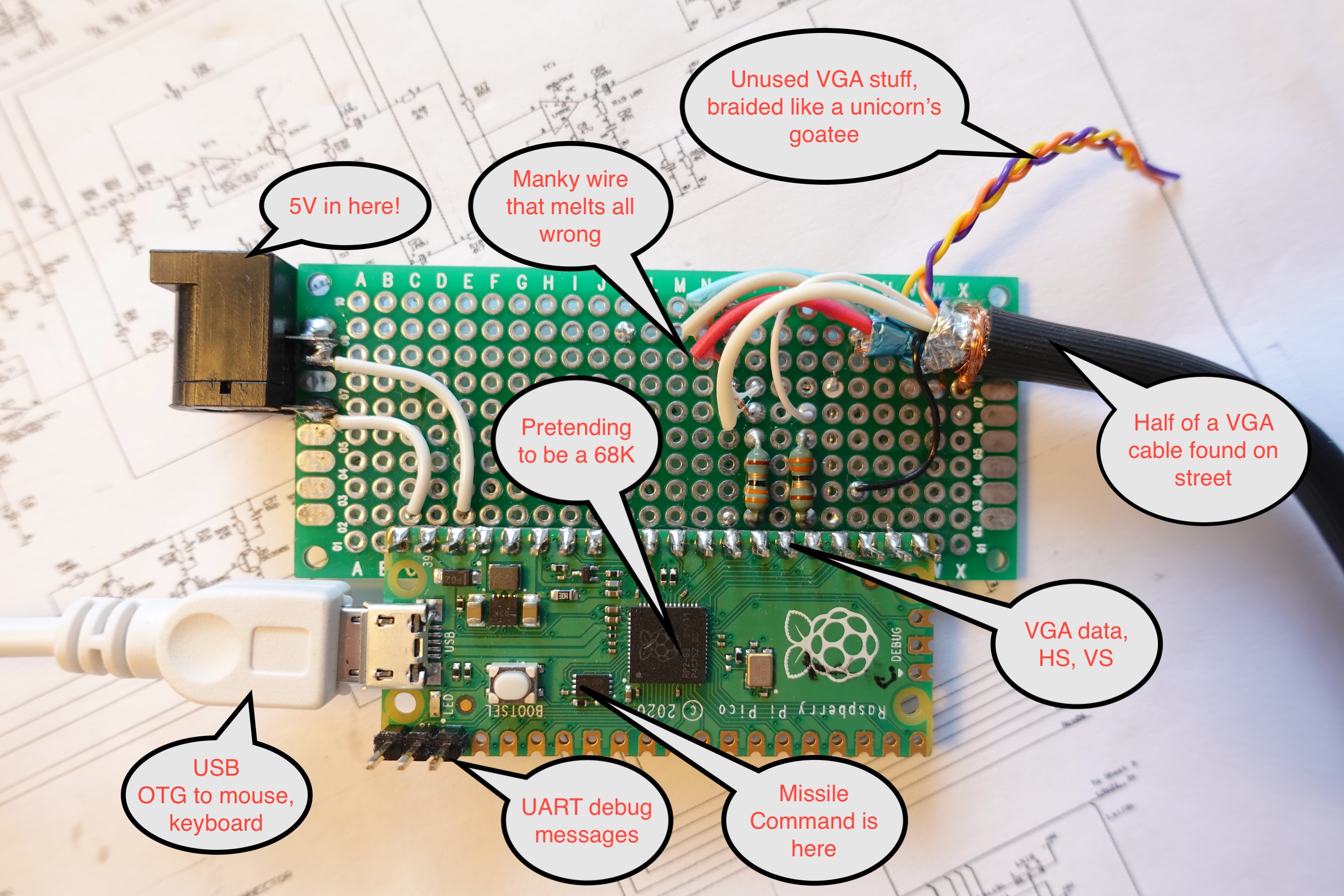
Completely unrelated to umac, I built up a circuit and firmare with two goals:
- Display 512x342x1 video to VGA with minimal components,
- Get the TinyUSB HID example working and integrated.
This would just display a test image copied to a framebuffer, and printf() keyboard/mouse events, as a PoC. The video portion was fun: I’d done some I2S audio PIO work before, but here I wanted to scan out video and arbitrarily control Vsync/Hsync.
Well, to test I needed a circuit. VGA wants 0.7V max on the video R,G,B signals and (mumble, some volts) on the syncs. The R,G,B signals are 75Ω to ground: with some maths, a 3.3V GPIO driving all three through a 100Ω resistor is roughly right.
The day I started soldering it together I needed a VGA connector. I had a DB15 but wanted it for another project, and felt bad about cutting up a VGA cable. But when I took a walk at lunchtime, no shitting you, I passed some street cables. I had a VGA cable – the rust helps with the janky aesthetic.

The VGA PIO side was pretty fun. It ended up as PIO reading config info dynamically to control Hsync width, display position, and so on, and then some tricks with DMA to scan out the config info interleaved with framebuffer data. By shifting the bits in the right direction and by using the byteswap option on the RP2040 DMA, the big-endian Mac framebuffer can be output directly without CPU-side copies or format conversion. Cool. This can be fairly easily re-used in other projects: see video.c.
But. I ended up (re)writing the video side three times in total:
First version had two DMA channels writing to the PIO TX FIFO. The first would transfer the config info, then trigger the second to transfer video data, then raise an IRQ. The IRQ handler would then have a short time (the FIFO depth!) to choose a new framebuffer address to read from, and reprogram DMA. It worked OK, but was highly sensitive to other activity in the system. First and most obvious fix is that any latency-sensitive IRQ handler must have the __not_in_flash_func() attribute so as to run out of RAM. But even with that, the design didn’t give much time to reconfigure the DMA: random glitches and blanks occurred when moving the mouse rapidly.
Second version did double-buffering with the goal of making the IRQ handler’s job trivial: poke in a pre-prepared DMA config quickly, then after the critical rush calculate the buffer to use for next time. Lots better, but still some glitches under some high load. Even weirder, it’d sometimes just blank out completely, requiring a reset. This was puzzling for a while; I ended up printing out the PIO FIFO’s FDEBUG register to try to catch the bug in the act. I saw that the TXOVER overflow flag was set, and this should be impossible: the FIFOs pull data from DMA on demand with DMA requests and a credited flow-contr…OH WAIT. If credits get messed up or duplicated, too many transfers can happen, leading to an overflow at the receiver side.
Well, I’d missed a subtle rule in the RP2040 DMA docs:
Another caveat is that multiple channels should not be connected to the same DREQ.
So the third version…… doesn’t break this rule, and is more complicated as a result:
- One DMA channel transfers to the PIO TX FIFO
- Another channel programs the first channel to send from the config data buffer
- A third channel programs the first to send the video data
- The programming of the first triggers the corresponding “next reprogram me” channel
The nice thing – aside from no lock-ups or video corruption – is that this now triggers a Hsync IRQ during the video line scan-out, greatly relaxing the deadline of reconfiguring the DMA. I’d like to further improve this (with yet another DMA channel) to transfer without an IRQ per line, as the current IRQ overhead of about 1% of CPU time can be avoided.
(It would’ve been simpler to just hardwire the VGA display timing in the PIO code, but I like (for future projects) being able to dynamically-reconfigure the video mode.)
So now we have a platform and firmware framework to embed umac into, HID in and video out. The hardware’s done, fuggitthat’lldo, let’s throw it over to the software team:
Back to emulating things
A glance at the native umac binary showed a few things to fix before it could run on the Pico:
- Musashi constructed a huge opcode decode jumptable at runtime, in RAM. It’s never built differently, and never changes at runtime. I added a Musashi build-time generator so that this table could be
const(and therefore live in flash). - The disassembler was large, and not going to be used on the Pico, so another option to build without.
- Musashi tries to accurately count execution cycles for each instruction, with more large lookup tables. Maybe useful for console games, but the Mac doesn’t have the same degree of timing sensitivity. REMOVED.
(This work is in my small-build branch.)
pico-mac takes shape, with the ROM and disc image in flash, and enjoyably it now builds and runs on the Pico! With some careful attention to not shoving stuff in RAM, the RAM use is looking pretty good. The emulator plus HID code is using about 35-40KB on top of the Mac’s 128KB RAM area – there’s 95+KB of RAM still free.
This was a good time to finish off adding the keyboard support to umac. The Mac keyboard is interfaced serially through the VIA ‘shift register’, a basic synchronous serial interface. This was logically simple, but frustrating because early attempts at replying to the ROM’s “init” command just were persistently ignored. The ROM disassembly was super-useful again: reading the keyboard init code, it looked like a race condition in interrupt acknowledgement if the response byte appears too soon after the request is sent. Shoved in a delay to hold off a reply until a later poll, and then it was just a matter of mapping keycodes (boooooorrrriiiiing).
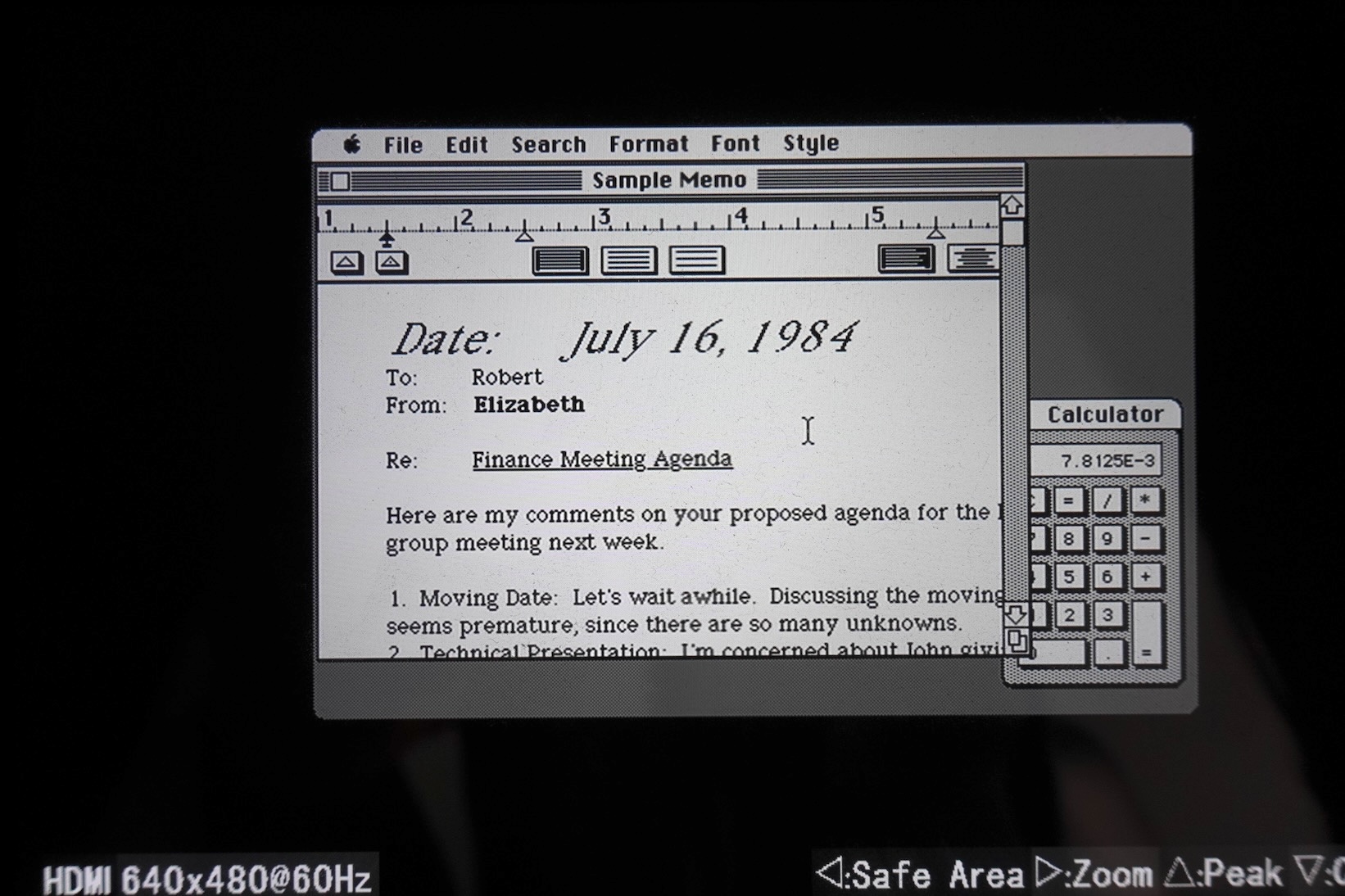
With a keyboard, the end-of-level MacWrite boss is reached:
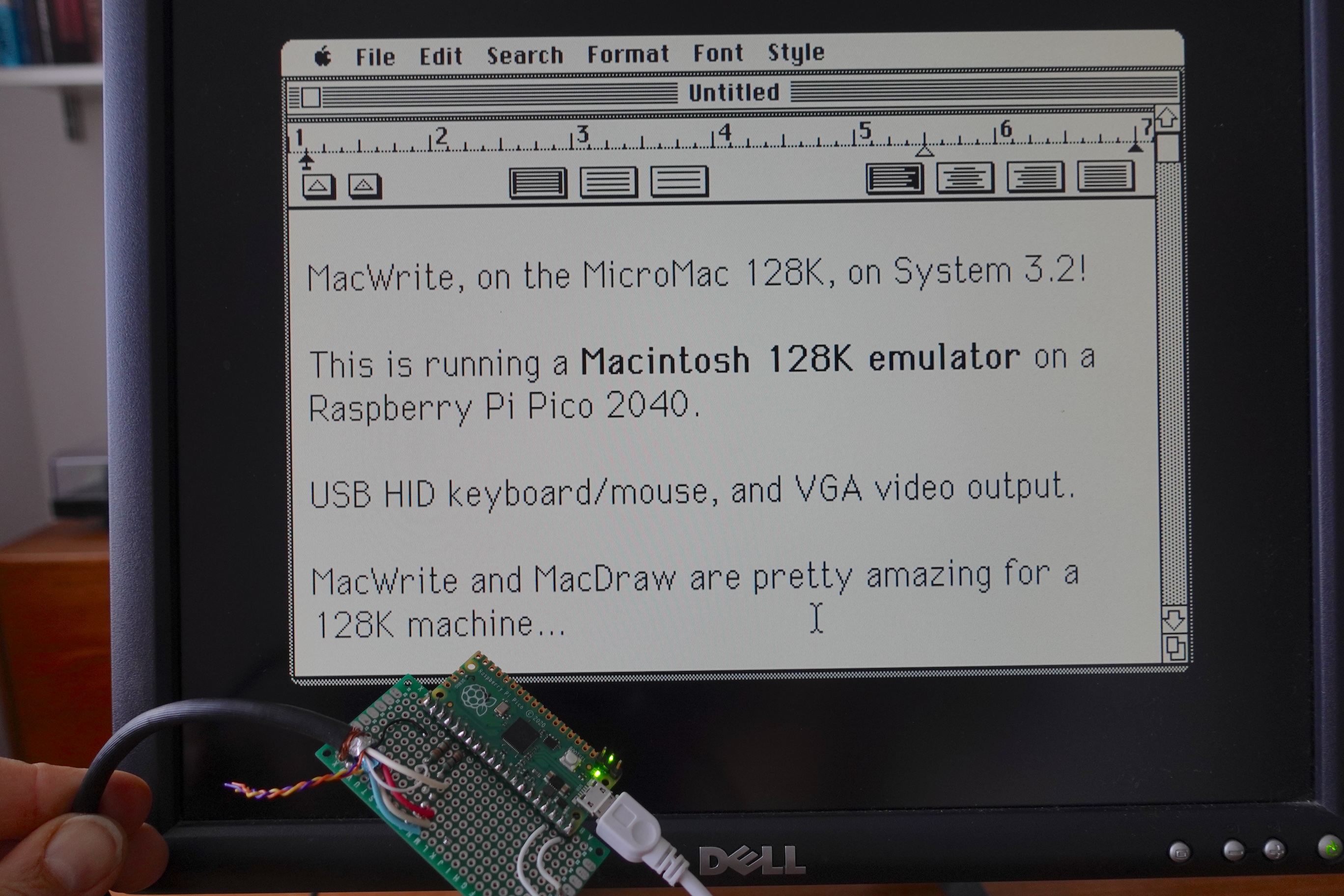
One problem though: it totally sucked. It was suuuuper slow. I added a 1Hz dump of instruction count, and it was doing about 300 KIPS.
The 68000 isn’t an amazing CPU in terms of IPC. Okay, there are some instructions that execute in 4 cycles. But you want to use those extravagant addressing modes don’t you, and touching memory is spending those cycles all over the place. Not an expert, but targeting about 1 MIPS for an about 8MHz 68000 seems right. Only 3x improvement needed.
Performance
I didn’t say I wasn’t gonna cheat: let’s run that Pico at 250MHz instead of 125MHz. Okay better, but not 2x better. From memory, only about 30% better. Damn, no free lunch today.
Musashi has a lot of configurable options. My first goal was to get its main loop (as seen from disassembly/post-compile end!) small: the Mac doesn’t report Bus Errors, so the registers don’t need copies for unwinding. The opcodes are always fetched from a 16b boundary, so don’t need alignment checking, and can use halfword loads (instead of two byte loads munged into a halfword!). For the Cortex-M0+/armv6m ISA, reordering some of the CPU context structure fields enabled immediate-offset access and better code. The CPU type, mysteriously, was dynamically-changeable and led to a bunch of runtime indirection.
Looking better, maybe 2x improvement, but not enough. Missile Command was still janky and the mouse wasn’t smooth!
Next, some naughty/dangerous optimisations: remove address alignment checking, because unaligned accesses don’t happen in this constrained environment.
(Then, this work is in my umac-hacks branch.)
But the real perf came from a different trick. First, a diversion!
RP2040 memory access
The RP2040 has fast RAM, which is multi-banked so as to allow generally single-cycle access to multiple users (2 CPUs, DMA, etc.). Out of the box, most code runs via XIP from external QSPI flash. The QSPI usually runs at the core clock (125MHz default), but has a latency of ~20 cycles for a random word read. The RP2040 uses a relatively simple 16KB cache in front of the flash to protect you from horrible access latency, but the more code you have the more likely you are to call a function and have to crank up QSPI. When overclocking to 250MHz, the QSPI can’t go that fast so stays at 125MHz (I think). Bear in mind, then, that your 20ish QSPI cycles on a miss become 40ish CPU cycles.
The particular rock-and-a-hard-place here is that Musashi build-time generates a ton of code, a function for each of its 1968 opcodes, plus that 256KB opcode jumptable. Even if we make the inner execution loop completely free, the opcode dispatch might miss in the flash cache, and the opcode function itself too. (If we want to get 1 MIPS out of about 200 MIPS, a few of these delays are going to really add up.)
The __not_in_flash_func() attribute can be used to copy a given function into RAM, guaranteeing fast execution. At the very minimum, the main loop and memory accessors are decorated: every instruction is going to access an opcode and most likely read or write RAM.
This improves performance a few percent.
Then, I tried decorating whole classes of opcodes: move is frequent, as are branches, so put ‘em in RAM. This helped a lot, but the remaining free RAM was used up very quickly, and I wasn’t at my goal of much above 1 MIPS.
Remember that RISC architecture is gonna change everything?
We want to put some of those 1968 68K opcodes into RAM to make them fast. What are the top 10 most often-used instructions? Top 100? By adding a 64K table of counters to umac, booting the Mac and running key applications (okay, playing Missile Command for a bit), we get a profile of dynamic instruction counts. It turns out that the 100 hottest opcodes (5% of the total) account for 89% of the execution. And the top 200 account for a whopping 98% of execution.
Armed with this profile, the umac build post-processes the Musashi auto-generated code and decorates the top 200 functions with __not_in_flash_func(). This adds only 17KB of extra RAM usage (leaving 95KB spare), and hits about 1.4 MIPS! Party on!
At last, the world can enjoy Missile Command’s dark subject matter in performant comfort:
What about MacPaint?
Everyone loves MacPaint. Maybe you love MacPaint, and have noticed I’ve deftly avoided mentioning it. Okay, FINE:
It doesn’t run on a Mac 128Ke, because the Mac Plus ROM uses more RAM than the original. :sad-face:
I’d seen this thread on 68kMLA about a “Mac 256K”: https://68kmla.org/bb/index.php?threads/the-mythical-mac-256k.46149/ Chances are that the Mac 128K was really a Mac 256K in the lab (or maybe even intended to have 256K and cost-cut before release), as the OS functions fine with 256KB.
I wondered, does the Mac ROM/OS need a power-of-two amount of RAM? If not, I have that 95K going spare. Could I make a “Mac 200K”, and then run precious MacPaint?
Well, I tried a local hack that patches the ROM to update its global memTop variable based on a given memory size, and yes, System 3.2 is happy with non-power-of-2 sizes. I booted with 256K, 208K, and 192K. However, there were some additional problems to solve: the ROM memtest craps itself without a power-of-2 size (totally fair), and NOPping that out leads to other issues. These can be fixed, though also some parts of boot access off the end of RAM. A power-of-2 size means a cheap address mask wraps RAM accesses to the valid buffer, and that can’t be done with 192K.
Unfortunately, when I then tested MacPaint it still wouldn’t run because it wanted to write a scratch file to the read-only boot volume. This is totally breaking rule #1 by this point, so we are staying with 128KB for now.
However, a 256K MicroMac is extremely possible. We just need an MCU with, say, 300KB of RAM… Then we’d be cooking on gas.
Goodbye, friend
Well, dear reader, this has been a blast. I hope there’s been something fun here for ya. Ring off now, caller!
-

- The MicroMac!
-

- HDMI monitor, using a VGA-to-HDMI box
-

- umac screenshot
-
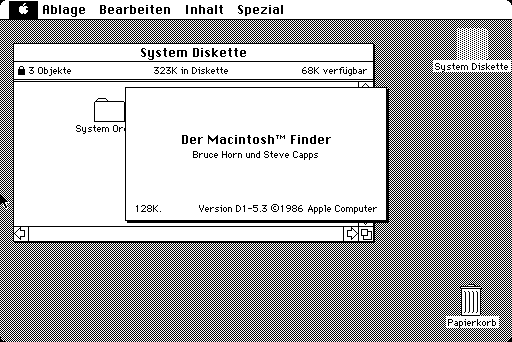
- System 3.2, Finder 5.3
-
- Performance tuning
-
- Random disc image working OK
Resources
- https://github.com/evansm7/umac
- https://github.com/evansm7/pico-mac
- https://www.macintoshrepository.org/7038-all-macintosh-roms-68k-ppc-
- https://winworldpc.com/product/mac-os-0-6/system-3x
- https://68kmla.org/bb/index.php?threads/macintosh-128k-mac-plus-roms.4006/
- https://docs.google.com/spreadsheets/d/1wB2HnysPp63fezUzfgpk0JX_b7bXvmAg6-Dk7QDyKPY/edit#gid=840977089